Sistema integrat de robots Delta
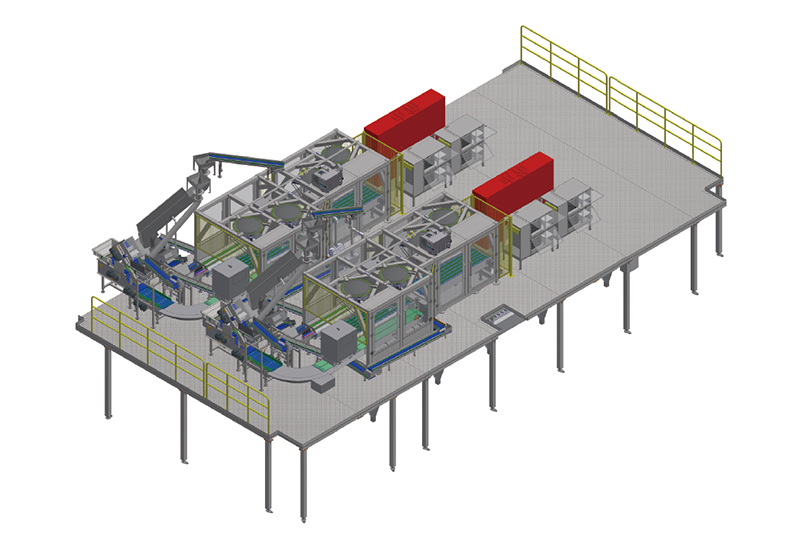
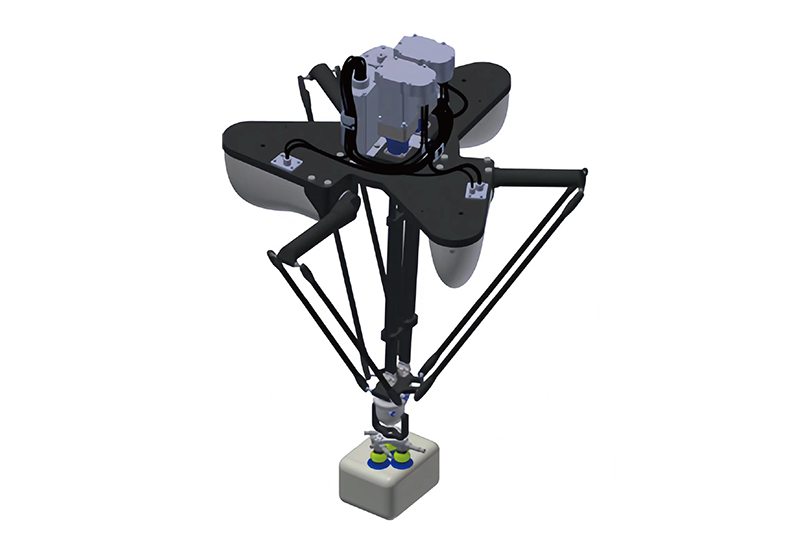
Els productes d'embalatge interior no ordenats es descarreguen del magatzem. Després de ser classificats pel servodescodificador i la posició del producte és reconeguda pel sistema visual. Durant l'envasament de caixes, el sistema visual compartirà la informació amb el robot aranya, i el robot aranya agafarà i col·locarà els productes a l'embalatge exterior corresponent.
Aplicació
Adequat per classificar, identificar i recollir productes d'embalatge interior no ordenats en forma d'ampolles, tasses, barrils, bosses, com ara te amb llet en pols, fideus, fideus instantanis, etc., i col·locar-los dins de l'embalatge exterior.
Dibuix en 3D


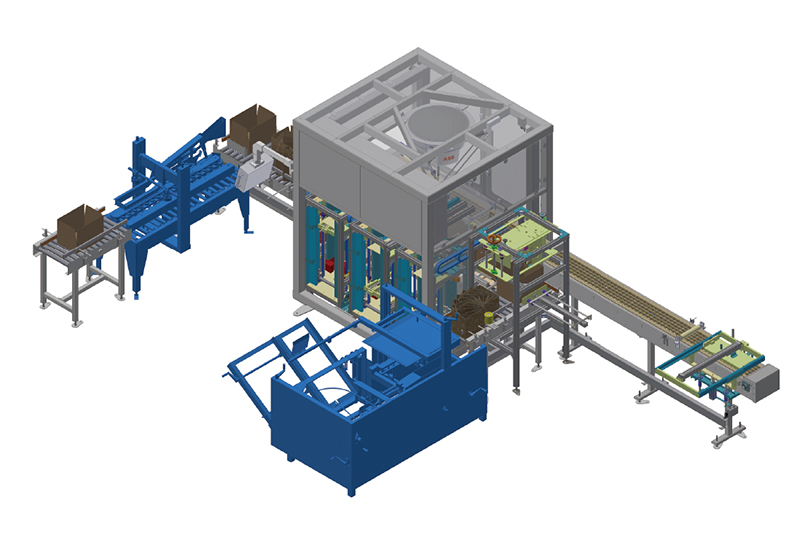
Línia d'embalatge
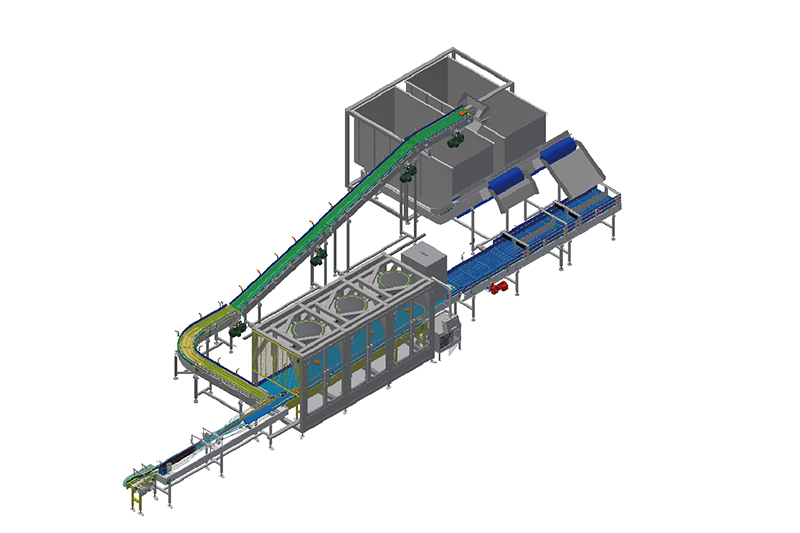
Línia de posicionador

Configuració elèctrica
| PLC | Siemens |
| Variador de freqüència | Danfoss |
| Servomotor | Elau-Siemens |
| Sensor fotoelèctric | MALALT |
| components pneumàtics | SMC |
| Pantalla tàctil | Siemens |
| Aparell de baixa tensió | Schneider |
| Terminal | Fènix |
| Motor | COSIR |
Paràmetre tècnic
| Model | LI-RUM200 |
| Velocitat estable | 200 peces/min |
| Font d'alimentació | 380 CA ±10%, 50 Hz, 3 FAS + N + PE. |
Més programes de vídeo
- Línia de classificació, alimentació, descodificació i embalatge de caixes amb robot Delta






