Línia d'embalatge de caixes de coordenades automàtica





Cas de coordenades automàtiqueslínia d'embalatge,
línia d'embalatge,
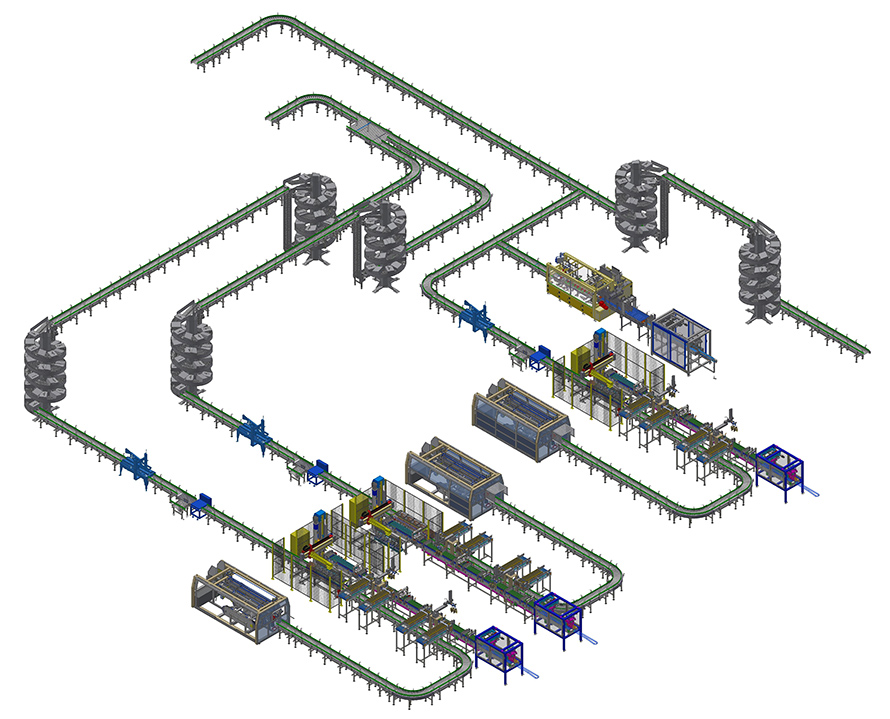
La línia de producció d'envasos consta d'un divisor d'alta velocitat, una línia de transport de productes, una línia de transport d'agafada, un robot Hbot, un mecanisme de moviment de doble eix, una línia de transport de caixes, un mecanisme de detecció, una pinça de partició de cartró, un sistema d'alimentació de particions de cartró, una coordenada servo, una pinça d'ampolles i una tanca protectora. El divisor d'alta velocitat divideix els productes en diversos carrils, mentre que el mecanisme de moviment de doble eix accelera el pas dels productes. Després que el producte arribi a l'estació de partició de cartró, el robot Scar carrega la partició de cartró als productes ordenats. Els productes arriben a la cinta transportadora de classificació. Després, els productes són recollits per la pinça i col·locats a la caixa de cartró, i la cinta transportadora de caixes transporta la caixa que conté el producte cap a fora.
El disseny complet del sistema d'embalatge
Configuració principal
| Braç robòtic | ABB/KUKA/Fanuc |
| Motor | SEW/Nord/ABB |
| Servomotor | Siemens/Panasonic |
| Variador de freqüència | Danfoss |
| Sensor fotoelèctric | MALALT |
| Pantalla tàctil | Siemens |
| Aparell de baixa tensió | Schneider |
| Terminal | Fènix |
| Pneumàtic | FESTO/SMC |
| Disc de succió | PIAB |
| Rodament | KF/NSK |
| Bomba de buit | PIAB |
| PLC | Siemens /Schneider |
| HMI | Siemens /Schneider |
| Placa/cadena de cadena | Intralox/Rexnord/Regina |
Descripció de l'estructura principal




Més programes de vídeo
- Encaixadora servocoordenades per a ampolles de vidre amb partició de cartró
Com funciona la màquina d'embalatge? Els productes passen per una sèrie de processos automatitzats
i passos ordenats, incloent la classificació a través de la línia de producció de transport, el pas a la classificació, un buffer accelerat, una màquina d'embalatge, un mecanisme de segellat automàtic i, finalment, la sortida per la línia de transport.










